Solution: To begin with, the matrix of the rotation is
|
|
|
Rotations about the origin through an angle q are linear transformations of the form
| (1) |
|
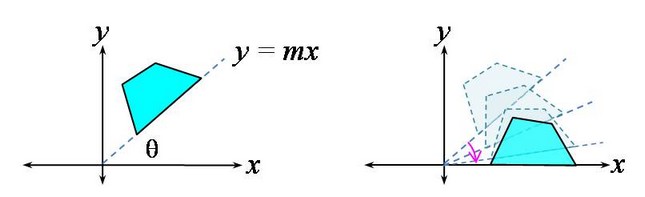
EXAMPLE 5 Rotate the triangle with vertices ( 0,0), ( 2,0) , and ( 0,2) through an angle q = p/3 about the origin.Often rotations are used to put figures into standard form, and often this requires rotating a line y = mx onto the x-axis.Solution: To begin with, the matrix of the rotation is
so that the resulting linear transformation is given by
R( q) = é
ê
ê
ê
ê
ê
ë
cos æ
èp 3
ö
ø
-sin æ
èp 3
ö
ø
sin æ
èp 3
ö
ø
cos æ
èp 3
ö
øù
ú
ú
ú
ú
ú
û= é
ê
ë
1/2
-Ö3/2
Ö3/2
1/2 ù
ú
ûThe point ( 0,0) is mapped to ( 0,0) . The point ( 2,0) is associated with [ 2,0] t, so that
T æ
ç
è
u
v ö
÷
ø= é
ê
ë
1/2
-Ö3/2
Ö3/2
1/2 ù
ú
ûé
ê
ë
u
v ù
ú
ûThat is, ( 2,0) is mapped to ( 1,Ö3) . Similarly, it can be shown that ( 0,2) is mapped to ( -Ö3,1) :
T æ
ç
è
2
0 ö
÷
ø= é
ê
ë
1/2
-Ö3/2
Ö3/2
1/2 ù
ú
ûé
ê
ë
2
0 ù
ú
û= é
ê
ë
1
Ö3 ù
ú
û
|
|
| (1) |
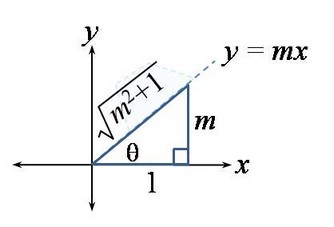
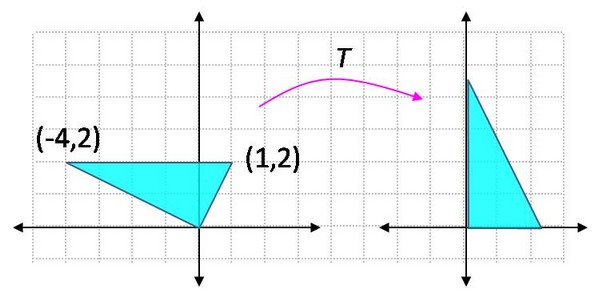
EXAMPLE 6 Rotate the triangle with vertices at ( 0,0) , (1,2) , and ( -4,2) so that one edge lies along the x-axis.Solution: The line through ( 0,0) and (1,2) is y = 2x, which implies that the rotation matrix is
Thus, the point ( 1,2) is mapped to
é
ê
ë
cos( -q)
-sin( -q)
sin( -q)
cos( -q) ù
ú
û= 1
22 + 1 é
ê
ë
1
2
-2
1 ù
ú
ûwhile the point ( -1,4) is mapped to
T æ
ç
è
1
2 ö
÷
ø= 1 Ö5
é
ê
ë
1
2
-2
1 ù
ú
ûé
ê
ë
1
2 ù
ú
û= é
ê
ë
Ö5
0 ù
ú
ûNotice that this reveals that that the triangle is a right triangle.
T æ
ç
è
-4
2 ö
÷
ø= 1 Ö5
é
ê
ë
1
2
-2
1 ù
ú
ûé
ê
ë
-4
2 ù
ú
û= é
ê
ë
0
2Ö5 ù
ú
û