Exercises
Find the velocity and acceleration of the following
vector-valued functions:
|
|
| | | | |
| | | | |
r( t) =
á ( t2-1) 1/2,( t2+1)-1,1
ñ |
|
| |
r( t) =
á 3cos( t) ,5sin( t) ,4cos( t)
ñ |
| | | |
r( t) =
á 3cos( t) ,5sin( t),4cos( t)
ñ |
|
| |
r( t) =
á tan(t), cot(t), csc( t)
ñ |
| | | |
r( t) =
á et, e-t, ln( t2+1)
ñ |
|
| |
r( t) =
á 1,1,ln[ sec(t) ]
ñ |
| | | |
r( t) =
á 2,3,1
ñ et -
á 1,4,7
ñ e-t |
|
| |
r( t) = t2 i + tan-1( t) j |
| | | |
| |
r( t) = e-t
á sin(t), cos( t), t
ñ |
| | | |
r(t) = tan( t)
á sin( t), cos(t), sec( t)
ñ |
|
|
|
|
Find the velocity at the given time and sketch it along with
the curve r( t).
|
|
| |
r( t) =
á t2, t4
ñ, t = 1 |
| | | |
r( t) =
á2t, 64-16t2
ñ , t = 1 |
|
| |
r( t) =
á cos(t), sin(t)
ñ , t = |
|
| | | |
r( t) =
á cos(t), sin( t)
ñ , t = |
|
|
| |
r( t) =
á et, e-t
ñ, t = 0 |
| | | |
r( t) =
á tan(t), sec( t)
ñ , t = |
|
|
| |
r( t) =
á 3t+1,2t+3
ñ , t = 2 |
| | | |
r( t) =
á bt2,2bt
ñ, t = 1 |
|
|
|
|
Find the velocity v(t) and the position r(t)
for the given acceleration and initial conditions, and determine the
plane of motion (if it exists). In exercises 23 - 26, also find the time to
maximum height, the maximum height, the time of impact, and the point of
impact of the projectile (note: 27 and 28 are projectile motions with a
small amount of atmospheric drag).
|
|
| | | | |
| |
r0 =
á 0,0,0
ñ,
v0 =
á 1,2,64
ñ |
| | | |
r0 =
á 0,0,0
ñ, v0 =
á 1,1,96
ñ |
|
| | | | |
| |
r0 =
á 1,3,0
ñ, v0 =
á 72,38,65
ñ |
| | | |
r0 =
á 2,1,3
ñ, v0 =
á 1,1,0
ñ |
|
| |
a(t) =
á 0, 0, -32 e -t/10
ñ |
| | | |
a(t) =
á 0, 0, -32 e -t/20
ñ |
|
| |
r0 =
á 0,0,64
ñ, v0 =
á 32,32,0
ñ |
| | | |
r0 =
á 0,0, 4
ñ, v0 =
á 0,0,0
ñ |
|
| |
a(t) =
á -3 sin(t),
-5 cos(t),
-4 sin(t)
ñ |
| | | |
a(t) =
á -3 sin(t),
-3 cos(t),
-12.2
ñ |
|
| |
r0 =
á 0,0,0
ñ, v0 =
á 0,0,0
ñ |
| | | |
r0 =
á 0,0,0
ñ, v0 =
á 0,0,0
ñ |
|
|
|
|
31. In example 6 a projectile is moving near the surface
of Mars, and we found that its position at time t is given by
|
r( t) =
á 10t, 20t, 64t - 6.1t2
ñ |
|
Find the plane of motion, the time to maximum height, the maximum height,
the time of impact, and the point of impact of the projectile, and then
compare the result to example 7, in which a projectile with the same initial
conditions is traveling near the earth.
32. When r(0) is in the xy-plane, then the
range of the projectile - i.e., the distance the projectile travels
between leaving the earth and striking the earth - is the length of the
vector r( timp) - r(0). That is,
|
range = || r( timp) - r(0)|| |
|
Find the range of the projectile in example 7, and then find the range of the
projectile in problem 31. How much farther would the projectile travel on Mars
than it would on the earth?
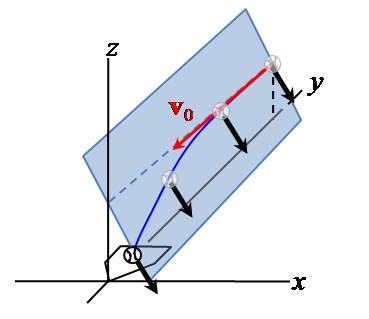
Exercises 33 - 38 explore Major League Baseball's "GameDay" pitch tracking
system, in which the trajectory of a pitch is calculated using an imaging
system, the coordinate system below,
and projectile motion. Specifically, the Game Day pitch tracking system
estimates the trajectory of a baseball in terms of a constant acceleration
a
(shown in black in the image above), a position r0
when tracking begins (the beginning of the blue curve), and an
initial velocity v0 when tracking begins
(40, 50, or 55 feet from the back of home plate).
33. On September 9, 2009 in a game between Anaheim and Seattle, Mark Jipsen
through Ken Griffey, Jr., a sweeping curveball with the following GameDay
vectors:
|
r0 =
á -2.924, 50, 5.895 ñ, v0 =
á2.264, -121.647, -2.486ñ |
|
|
a =
á 10.529, 30.971, -41.439
ñ |
|
Find the parameterization of the ball's trajectory r(t) by integrating a twice
and using the given initial data. What is the plane of motion of the curveball?
What is its position as it crosses the front of the plate ( i.e., when y=1.417
feet)? How much did it move from left to right
34. Repeat Exercise 33 for Mark Jipsen's last pitch of that game, which is
|
r0 =
á -2.901, 50, 5.773 ñ, v0 =
á 8.42, -141.714, -4.76ñ |
|
|
a =
á -1.669, 36.404, -13.16
ñ |
|
Is this also a curveball (in your opinion)?
35. On July 3, 2009 in a game between Minnesota and Detroit, Joel Zumaya threw a
pitch clocked at well over 100 mph (and possibly the fastest pitch ever recorded
-- a possible 105 mph when it left his hand at approximately y=55 feet). The
data for that pitch is
|
r0 =
á -1.901, 50, 5.928 ñ, v0 =
á 9.588, -147.939, -5.642ñ |
|
|
a =
á -15.819, 39.136, -6.834
ñ |
|
How fast was the pitch traveling initially (i.e., when y=50 feet)? How long did
it take to travel from y=55 (approximate point of release) to y=1.417 feet (the
front of the plate)? How fast was it traveling when it crossed the front of the
plate? (hint: 1 mile = 5280 feet).
36. Try it out! The data and information above can be obtained by beginning at
Alan M. Nathan's website
http://webusers.npl.illinois.edu/~a-nathan/pob/tracking.htm.
Try finding the information above for an outing of your favorite pitcher and
then repeating exercise 33.
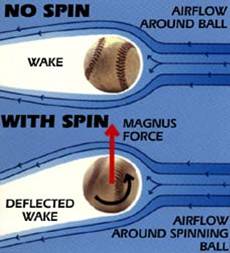
37. Magnus Force: The pitches in exercise 33 to 36 do not fall
straight down because the spin of a baseball creates a force called the
Magnus force which is perpendicular both to the direction of motion and to
the axis about which the ball spins.
For example, an angular velocity of about 1500 revolutions per minute
induces a Magnus force which is about 1/3 the acceleration due to gravity --
i.e., about 11 feet per sec per sec! Drag must also be considered when
Magnus force is considered, giving us an approximate acceleration of
Use this information to construct the trajectory of such a baseball given
that
|
r0 =
á 0, 50, 6 ñ, v0 =
á 0, -132, 0ñ |
|
(i.e., ball 6 feet above the ground traveling 90 mph at 50 feet from the
back of home plate).
38. Magnus Force Theory: In reality, the drag, magnus, and gravitational
forces lead to an acceleration vector of the form
|
a = -KCDvv - KCLv ( w
×v) - g |
|
where
K is a constant equalt to about 5.44×10
-3 per foot,
v is the magnitude of the velocity
v vector,
g is the acceleration due to gravity,
w is the unit vector parallel
to the axis of rotation of the ball, and
CD and
CL are the drag and lift constants, respectively. Explain why
a cannot be constant (i.e., the same at all times), and use this to explain why the Gameday curves are only statistical approximations and not actual physical trajectories. (
more with Magnus force in later sections!)
39. When r0 =
á 0,0,0
ñ , projectile motion begins at the origin. Show that when r0 =
á 0,0,0
ñ , then timp = 2tmax.
40. * A Basketball's Initial Velocity: An NBA player shoots a 3-pointer from 24 feet ( 3 point line is at 23'9''),
and 1.4 seconds elapse before it passes through the hoop. If we assume that
the player released the ball from a height of 8 feet, then what is the
initial velocity of the ball? And what is the ball's maximum altitude?
41. Bezier Curves: The Bezier curve determined by
the 4 points P0( x0,y0) , P1(x1,y1) , P2( x2,y2) , and P3(x3,y3) is the curve with endpoints P0 and P3 which
is tangent to the vectors P0P1 and P2P3 at the points P0 and P3, respectively.
|
|
| (Click and drag the black "dots." Arrows drawn to 1/3 scale.) |
|
In this exercise, we show that a Bezier curve is the graph of the vector
valued function
|
r( t) =
á x0,y0
ñt3 + 3
á x1,y1
ñ t2( 1-t) + 3
á x2,y2
ñ t( 1-t) 2 +
áx3,y3
ñ ( 1-t) 3 |
|
for
t in [ 0,1] .
- Compute r( 0) and r( 1) .
- Compute v( t) , and then compute v( 0) and v( 1) .
- Explain how (a) and (b) relate to the figure shown above.
42. Bezier Curves: Construct the Bezier curve using the
parameterization in exercise 39 using the 4 points P0( 0,0) ,
P1( 0,1) , P2( 1,1) , and P3(1,0) , and then sketch the result along with the vectors
P0P1 and P2P3.
43. Write to Learn: Bezier curves are often used to connect a sequence
of points (position vectors) P₀, P₁,…,P_{n} with a curve subject to a set of
control points (position vectors) Q₀,…,Q_{n-1},R₀,…,R_{n-1}.
Write short essay in which you show that for each
j = 1,…,
n, the curve
|
rj(t) = Pj-1t3 + 3Q1
ñ t2( 1-t) + 3
á x2,y2
ñ t( 1-t) 2 +
áx3,y3
ñ ( 1-t) 3 |
|
for t in [0,1] satisfies r_{j}(0)=P_{j-1} and r_{j}(1)=P_{j}, as well as
|
r( u) =
á f( f( u) ), g( f( u) ), h( f( u) )
ñ , u in [ c,d] |
|
What conditions on P_{j}, R_{j-1} and Q_{j}, j=0,…,n-1, are necessary for
the collection of "pieces" r₁(t),…,r_{n}(t) to form a smooth curve
connecting all the points P₀, P₁, P₂,…,P_{n} .
|
r( u) =
á f( f( u) ), g( f( u) ), h( f( u) )
ñ , u in [ c,d] |
|
parameterizes the same curve
C when
c =
f-1(
a) and
d =
f-1(
b) .
What is the velocity vector for the new parameterization? Is it the same
as for the original parameterization?
44. Write to Learn: Suppose that
r(
t) =
á f(
t),
g(
t),
h(
t)
ñ ,
t in [
a,
b] parameterizes a curve
C and
suppose that
f is a differentiable, 1-1 function. Write a short essay
explaining why
|
r( u) =
á f( f( u) ), g( f( u) ), h( f( u) )
ñ , u in [ c,d] |
|
parameterizes the same curve
C when
c =
f-1(
a) and
d =
f-1(
b) .
What is the velocity vector for the new parameterization? Is it the same
as for the original parameterization?